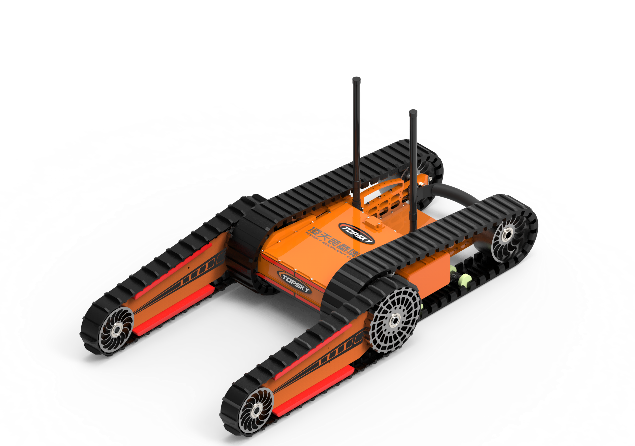
I-RXR-C10D Irobhothi encinci yokuhlola umlilo


| Iirobhothi ezijongana nomlilo zisetyenziswa ikakhulu ekuthatheni indawo esondelayo eyenziweyo enokutsha, eqhumayo, entsonkothileyo kunye nezinye iimeko ezirhabaxa ukuze kuqwalaselwe indalo nokubhaqwa kwegesi.Zingasetyenziselwa ukuphinda ziqwalaselwe kwiindawo ezincinci neziphantsi ezinje ngasezantsi kumzimba wemoto kunye nezantsi kweshelufu.I-chassis ithatha i-crawler + yangaphambili yesakhiwo sengalo ejikelezayo ephindwe kabini, esinokuwela imiqobo engama-280mm ngokuthe nkqo kakhulu, kwaye inokunyuka iqonga le-360mm, elinokuziqhelanisa neendawo ezahlukeneyo zokulwa ngokukhawuleza.I-interface yokwandisa imisebenzi emininzi inokuxhotyiswa ngeemodyuli ezahlukeneyo zomzimba.Ngexesha elifanayo, i-robot ixhotyiswe ngokulawulwa kweengcingo, ezinokuthi zisebenze ngokude ngentambo phantsi kwemeko yokuphazamiseka komqondiso.Iingalo ezijingi ezimbini zerobhothi zinokuqhawuka ngokukhululekileyo, ezinokuthi zisetyenziswe kwiimeko ezininzi. |
| 2.Iimbonakalo |
| 1. Ulawulo olukude lwe-Smart Imisebenzi emininzi yokwandisa iqhosha Ukusebenza okubonwayo kwesikrini esikhulu 2. Imodyuli yomatshini wonke Imodyuli yeChassis, imodyuli yebhetri, ukunqunyanyiswa kwemodyuli 3. Ukusebenza okugqwesileyo ekunyukeni, ukunyuka izitebhisi, ukuwela imiqobo kunye nokuwela imisele Unokunyuka amathambeka angama-45 Unokunyuka izinyuko ezingama-40 Inokunyuka i-28 cm imiqobo ethe nkqo Inokufikelela kwi-41 cm yemisele ebanzi 4.Inkqubo yevidiyo Imowudi yonxibelelwano ye-3, ukusombulula imisebenzi eqhelekileyo kwindawo engabonakaliyo, umgama wonxibelelwano 1km Ikhamera ye-HD yesitishi esi-2 5.Iimodyuli ezininzi zokwandiswa Imodyuli ye-Lidar, imodyuli yokufumanisa igesi, imodyuli ye-gimbal ye-reconnaissance, imodyuli yengalo yerobhothi
Izibuko ezine ezandisiweyo zeeplagi zomoya, ezigciniweyo RS232, RS485, CAN, izibuko zenethiwekhi, 24V, 12V (ngokuqhelekileyo ivaliwe)
|
| 3.Tiiparameters zobuchwephesha3.1 Iyonke irobhothi: 1. Igama: I-RXR-C10D i-robot encinane yokuqaphela umlilo (B) 2. Umzekelo: RXR-C10D 3. Umsebenzi osisiseko: umsebenzi wokuhlaziya ividiyo 4. Inqanaba lokukhusela: inqanaba lokukhusela irobhothi yonke yi-IP67 5. Amandla: umbane, ibhetri ye-lithium ye-ternary 6.Ubukhulu: ≤ubude 610mm× ububanzi 490mm× ubude 200mm (ngaphandle kwe-eriyali) 7. Ukuguqula ububanzi: ukujikeleza kwindawo 8.Ubunzima: ≤25kg 9. Isantya esiphezulu somgca: ≥2.7m / s, ulawulo olude lwesantya esingenasinyathelo 10. Isixa esithe ngqo sokutenxa: ≤5% 11.Amandla okunyuka: ≥45 ° 12. Ikhono lokunyuka: ≥40 ° 13. Ukuphakama kwemiqobo yokuwela: ≥280mm I-14.Ixesha lokuhamba ngokuqhubekayo: ≥2h 15. Umgama wolawulo olukude ongenazingcingo: 500m (evulekileyo) 16. Umgama wokuhanjiswa kwevidiyo engenazingcingo: 500m (evulekileyo) unxibelelwano lwamanqaku amabini;I-800m (evulekileyo) yonxibelelwano lwamanqaku amathathu ukuhlangabezana nendawo yokufihla (ukhetho); I-17.Umgama olawulwa kude owenziwe ngeentambo: 100m Umgama wokuhanjiswa kwevidiyo ye-18.Wired: 100m 19.Irobhothi erhuqayo: Irobhothi erhuqayo izakwenziwa ngerabha engatshiyo lidangatye, i-anti-static kunye nobushushu obuphezulu obunganyangekiyo, kunye neKevlar ngaphakathi, kunye noyilo lokhuselo lokuhamba.
3.2 Imbono yevidiyo yerobhothi: 1.Inombolo kunye noqwalaselo lweekhamera: Iikhamera ezimbini ezinenkcazo ephezulu emzimbeni zinokujongwa kwaye zilawulwe ngaxeshanye, kwaye indawo ejikeleze indawo inokubekwa ngokuzinzileyo kumlawuli okude, onokwanelisa ukuqhuba ngaphandle kwamacingo. irobhothi kwaye uphucule kakhulu ukusebenza kakuhle kokulwa. 3.3 Iiparamitha zoqwalaselo lwetheminali yolawulo olukude 1. Imilinganiselo: 362*188*40 (Ngaphandle kobude be-rocker) 2. Ubunzima bomatshini wonke: 2.5kg 3. Bonisa: akukho ngaphantsi kwee-intshi ezili-10 zokukhanya okuphezulu kwesikrini se-LCD, iziteshi ezi-4 zokutshintsha umqondiso wevidiyo 4. Iqonga lenkqubo yokulawula: inkqubo yokusebenza yewindow10 5.Ixesha lokusebenza: 2h (ngokuqhubekayo) 6. Imisebenzi esisiseko: I-remote control kunye ne-monitor ihlanganiswe kwaye iphathekayo, enokuthi ijongwe kwaye ilawulwe ngexesha elifanayo, kunye nendalo ejikeleze indawo inokubonakaliswa ngokuzinzileyo kumqhubi okude. (Umsebenzi okhethiweyo) Umboniso wexesha langempela lomzimba wesithuthi kunye nebhokisi yokulawula ibhetri amandla, umgama wokuhamba kunye nolunye ulwazi, kwaye unokulawula ukunyakaza kwerobhothi phambili, ngasemva, kunye nokulawula.Indlela yogqithiso lwedatha lugqithiso lwamacingo kusetyenziswa isignali efihliweyo I-7.Ukurekhoda kwevidiyo kunye nomsebenzi wokudlala: ividiyo inokubhalwa nangaliphi na ixesha, kwaye umxholo wevidiyo orekhodiweyo unokugcinwa ngokuzenzekelayo, kwaye ividiyo ingadlalwa ngokuthe ngqo kwi-terminal yokulawula kude, okanye ividiyo inokukopishwa kwezinye izixhobo. 8. Umsebenzi wokulawula ukuhamba: Ewe, i-1 yovuyo iqonda ukusebenza okuguquguqukayo kwerobhothi ukuya phambili, ngasemva, ukujika kwesobunxele kunye nokujika kwasekunene. 9. Ukutshintsha kwevidiyo: Ewe, uzisete ngokutsha i-jog switch 10. Umsebenzi wokulawula ukukhanyisa: Ewe, guqula utshintsho
4.4 Okunye: I-100m yonxibelelwano lweentambo zonxibelelwano Ubude: 100mm |
| 4.Ubumbeko lwemveliso |
| 1. I-RXR-C10D i-robot encinci yokuhlola umlilo (B) i-1 set2.Ibhokisi yokulawula kude (kubandakanya ibhetri) 1 iseti 3. Itshaja yokulawula kude (12.6V) 1 pcs 4. Itshaja yomzimba werobhothi (25.2V) 1 1 iipcs 5. 1.4GHZ i-eriyali yokuhanjiswa komfanekiso 4 iipcs 6. Unxibelelwano ngeentambo 100 yeemitha spool 1 pcs 7. Izixhobo ezincedisayo 1 iseti |